Imagerie par lancer de rayons
David Monniaux
David.Monniaux@ens.fr
1 Principe de base
Figure 1 : Trajet de la lumière depuis les objets (boule) jusqu'à la
caméra, en passant par l'écran.
Nous désirons produire une image de synthèse en simulant
informatiquement le trajet des rayons lumineux entre les surfaces
illuminées et l'oeil (ou la caméra) de l'observateur, d'où le nom de la
technique, le lancer de rayons (ray-tracing en
anglais).1
Nous allons en fait simuler le trajet inverse du rayon depuis
l'oeil de l'observateur (Fig. 1) : après être
parti de l'oeil en direction d'un point sur l'écran virtuel, le
rayon atteint un objet : c'est la couleur de la surface de cet objet
que nous allons afficher. Nous verrons plus tard comment calculer
cette couleur en fonction des conditions d'éclairement.
Plus mathématiquement:
on se donne une position C de la caméra, une direction u
dans laquelle elle regarde, et deux vecteurs v et
w. Soient L et H respectivement la largeur et la hauteur
en pixels de l'écran. Il faut alors imaginer l'image produite tendue
comme un écran dont le centre est en C + u et dont la largeur
et la hauteur sont dirigées par v et w. Le pixel de
coordonnées (x,y) correspond donc au point de coordonnées
C + d(x,y) où
| d(x,y) = u
+ |
æ
ç
ç
è |
|
- |
|
ö
÷
÷
ø |
v
+ |
æ
ç
ç
è |
|
- |
|
ö
÷
÷
ø |
w. |
2 Spécification des objets
Il nous faut un moyen pour l'utilisateur de spécifier des objets
géométriques. Nous avons choisi de considérer des objets formés par
combinaisons logiques (union, intersection...) de primitive
géométriques.
2.1 Géométrie solide constructive
Nous spécifions les objets de la scène en géométrie solide
constructive (constructive solid geometry ou CSG),
c'est-à-dire comme des volumes que l'on peut combinet à l'aide
d'opérateurs logiques ∧ (et), ∨ (ou) et ¬ (négation).
Chaque objet de la scène est donc représenté sous la forme d'un arbre
dont les noeuds sont les opérateurs logiques et les feuilles des
primitives solides. Supposons par exemple que nous disposons de
primitives pour un cylindre infini défini par x2 + y2 ≤ 1 et pour les
demi-espaces z ≤ 1 et z ≥ -1 ; l'intersection des trois nous
fournira un cylindre de longueur 2.
Les opérations suivantes doivent être implémentées :
-
en fonction d'un point (x,y,z), dire s'il appartient au
solide (en fait, on peut se passer de cette opération) ;
- en fonction d'un rayon O+Rv donné par les coordonnées
de O et v, obtenir la liste des coordonnées t décrivant les
intersections O+tv avec le solide.
On négligera les problèmes de précision numérique s'ils deviennent
complexes à traiter.
Les deux opérations à implémenter le seront par induction sur l'arbre
représentant la formule en géométrie solide constructive (ainsi, la
liste des intersections d'un rayon R
avec l'union de deux objets A et B peut
facilement s'obtenir à partir des listes d'intersection de R avec
ces deux objets).
2.2 Primitives solides
Nous considérerons des objets définis par des inéquations polynômiales
de la forme P(x,y,z) ≤ 0. Ainsi, une boule de rayon 1 centrée
en (0,0,0) sera définie par x2+y2+z2 ≤ 0 ; un demi-espace
dont la frontière est située à une distance d du point (0,0,0)
et dont le vecteur normal unitaire tourné vers l'extérieur est
(vx,vy,vz) sera défini par vx x + vy y + vz z - d ≤ 0.
On pourra considérer plus généralement les quadriques définies par
Q(x,y,z) + L(x,y,z) + d ≤ 0 où Q est une forme quadratique, L
une forme linéaire et d un scalaire ; suivant la signature de la
forme quadratique, on obtiendra des ellipsoïdes, des hyperboloïdes à
une nappe, des hyperboloïdes à deux nappes ou des quadriques
dégénérées.
Il pourra être plus facile de considérer une quadrique
projective (forme quadratique Q en dimension 4 et résolution de
Q(x,y,z,1)=0). Un tel formalisme facilite beaucoup les
opérations de translations, rotations etc..., qui seront vues comme
des matrices à multiplier à la forme quadratique.
Remarquons que calculer les intersections d'un rayon O+Rd
avec la surface définie par P est équivalent à chercher les zéros en
t du polynôme P(O+td), lequel est au plus du même degré que
le degré total de P.
2.3 Transformations géométriques
On permettra d'appliquer des transformations géométriques telles que
translation, rotations, facteur d'échelle sur les trois axes. Ces
opérateurs sont des opérateurs affines ; par souci d'homogénéité, nous
définirons les opérations comme des transformations projectives,
associant à un point (x,y,z,1) son image (x',y',z',1) :
On permettra en particulier les opérations suivantes
-
Translation
-
Pour une translation de vecteur (τx, τy, τz) :
|
M = |
é
ê
ê
ê
ë |
| 1 |
0 |
0 |
τx |
| 0 |
1 |
0 |
τy |
| 0 |
0 |
1 |
τz |
| 0 |
0 |
0 |
1 |
|
ù
ú
ú
ú
û |
|
(2) |
- Rotation
-
Pour une rotation de θ radians autour de l'axe Z (on prévoiera
une spécification en degrés pour l'utilisateur) :
|
M = |
é
ê
ê
ê
ë |
| cosθ |
-sinθ |
0 |
0 |
| sinθ |
cosθ |
0 |
0 |
| 0 |
0 |
1 |
0 |
| 0 |
0 |
0 |
1 |
|
ù
ú
ú
ú
û |
|
(3) |
On permettra aussi les rotations autour des axes X et Y.
- Mise à l'échelle
-
Pour une mise à l'échelle de facteurs respectifs αx,
αy, et αz sur les axes X, Y et Z,
|
M = |
é
ê
ê
ê
ë |
| αx |
0 |
0 |
0 |
| 0 |
αy |
0 |
0 |
| 0 |
0 |
αz |
0 |
| 0 |
0 |
0 |
1 |
|
ù
ú
ú
ú
û |
|
(4) |
La composition de plusieurs transformations se fait par produit de
matrices. Il pourra être utile d'implémenter une petite bibliothèque
de calcul vectoriel et matriciel.
Soit un objet A tel que la liste des t tels que O+tv
soit une intersection du rayon O+Rv avec la surface de O
soit donné par intersect(A, O, v). Nous nous
intéressons à l'image M.A de l'objet A par la transformation
affine de matrice projective A. Alors,
intersect(M.A, O, v) =
intersect(A, π3(M-1.ι41(O)), π3(M-1.ι40(v)))
(5)
où π3(x,y,z,1)=(x,y,z), ι4t(x,y,z) = (x,y,z,t).
Illustrons cela sur une quadrique A définie par Q(x,y,z,1)=0.Notant
Q* la forme bilinéaire associée à la forme quadratique Q,
l'équation définissant les intersections intersect(A, O,
v) est :
Q(ι41(O)) + Q*(ι41(O), ι40(v)) t
+ Q(ι41(v)) t2 = 0
(6)
On en déduit que l'objet M.A est défini par la forme quadratique
tM-1.Q.M-1. En fait, nous n'avons besoin que de M-1 et
non de M.
3 Modèle d'illumination
Afin d'obtenir un résultat réaliste, nous associerons à chaque point
vu à la surface des objets une couleur. Par souci de simplicités, les
couleurs seront calculées comme un triplet (R,V,B) représentant la
décomposition de la couleur en composantes rouge, verte et bleue ;
la superposition additive de deux couleurs sera simplement l'ajout des
vecteurs.
Le calcul de la couleur d'un point pourra se faire à l'aide du modèle
suivant, version simplifiée de celle du logiciel POV-Ray. Notons
-
N le vecteur unitaire normal de la surface pointant vers
l'extérieur (en supposant que la caméra soit à l'extérieur).
- V le vecteur unitaire menant de la caméra au point considéré
de la surface.
- L le vecteur unitaire menant du point considéré vers la
source lumineuse primaire.
-
Diffusion
- Il s'agit de la composante principale de
l'éclairement. Son intensité dépend de
Id = (N . L) b où b est un exposant de
« brillance » (1 par défaut) ;
- Phong
- Il s'agit d'une modélisation du phénomène de reflet
direct d'une source lumineuse sur une surface luisante :
Ip = (R . L)s
où R = -2 (V . N) N + V est le symétrique
du vecteur -V par rapport au vecteur N ;
- Spéculaire
- Une autre modélisation du même phénomène :
Is = (H . N) 1 / r
où H = L - V/||L - V|| est
le vecteur bisecteur normalisé de -V et de L ; r
indique la « rugosité » du matériau (1/r=30 donne des résultats
intéressants).
On pourra ajouter la modélisation de phénomènes de réflexion, de
réfraction et d'ombres portées.
Nous rappelons qu'en ce qui concerne une surface de la forme Q(P)=0
où Q est une forme quadratique, un vecteur normal dirigé vers
les Q(P) > 0 est donné par 2u où Q*(P,u)=P.u,
c'est à dire que u est l'image de P par la matrice
symétrique définissant Q.
4 Travail demandé
Le logiciel réalisé devra prendre un entrée une description de la
scène écrit dans un langage simple et produire en sortie une image.
Le langage d'entrée devra permettre de spécifier facilement des objets
construits en CSG.
Une description d'une grammaire d'entrée fortement recommandée
sera donnée sur la page WWW du projet.
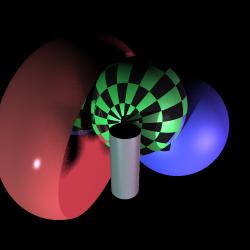
Figure 2 : Exemple de scène
Voici un exemple de fichier source, pour un petit logiciel de rendu
réalisé en Java par l'auteur de l'énoncé :
union {
applyTexture(
solid {
diffusion <0.32, 0.32, 0.9>
specular <0.3, 0.3, 0.3>
},
translate (<1, 0, 0>, sphere1 ))
applyTexture(
solid {
diffusion <0.8, 0.3, 0.3>
specular <0.8, 0.8, 1.0>
specularExponent 1000
reflexion <0.4, 0.5, 0.4>
},
translate (<-1, 0, 0.5>,
rotateZ(20, scale (<1.5, 2.0, 2.0>,
rotateY(20,
intersection {
translate(<0.5, 0, 0>, halfSpace(<1,0,0>)) sphere1 } )))))
translate (<0.2, -0.3, -0.9>,
rotateZ(40,
rotateX(25,
applyTexture(
checker(cylindrical(scale(<0.1, 0.5, 1>, id)), {
solid {
diffusion <0.32, 0.9, 0.4>
specular <0.3, 0.3, 0.3>
}
solid {
diffusion <0.1, 0.1, 0.1>
specular <0.9, 0.9, 0.9>
specularExponent 1000
reflexion <0.9, 0.9, 0.9>
}}),
scale (0.8, sphere1 )))))
applyTexture(
solid {
diffusion <0.5, 0.5, 0.5>
specular <0.3, 0.3, 0.3>
specularExponent 50
},
translate(<0, 0.5, -1.6>,
rotateX(30,
intersection { scale(0.2, cylinderY1)
translate(<0,-0.5,0>, halfSpace(<0,-1,0>))
translate(<0,0.5,0>, halfSpace(<0,1,0>))} )))
}
décrivant un objet qui, éclairé par deux lumières, donne l'image en
Fig. 2.
On trouvera d'autres exemples sur la page du projet.
- 1
- Il ne s'agit pas de la seule technique permettant de produire
des images de synthèse. Les scènes d'animation tridimensionnelles
des jeux sont généralement produites à l'aide de techniques plus
rapides, mais moins basées sur la simulation physique (tracés en
Z-buffer...). Il existe par ailleurs des techniques de simulation
physique beaucoup plus puissantes et réalistes... mais aussi très
coûteuses en temps de calcul et en complexité d'implémentation,
telles que les techniques de radiosité.
Ce document a été traduit de LATEX par
HEVEA.